695
1083
2万
管理员
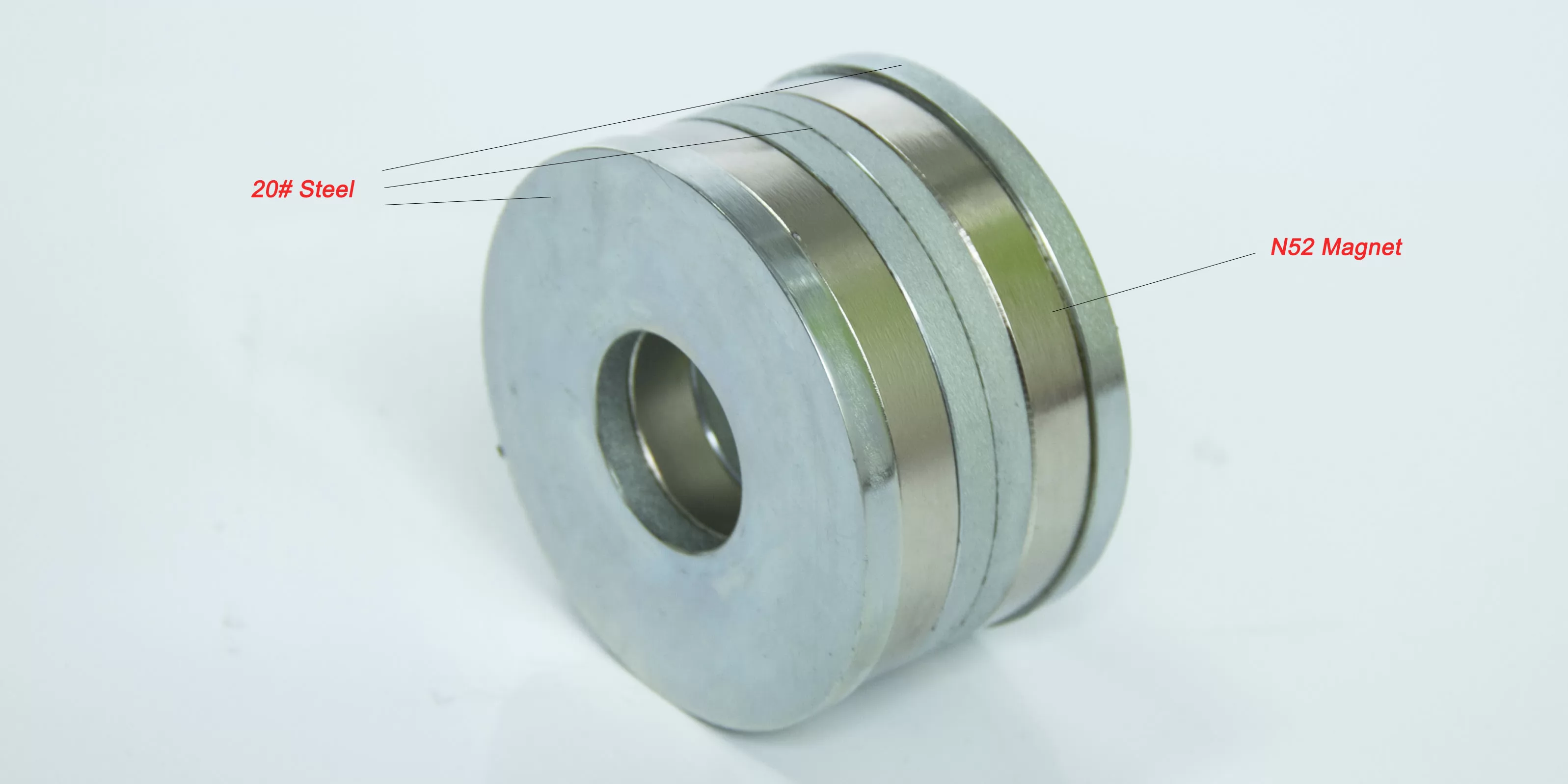
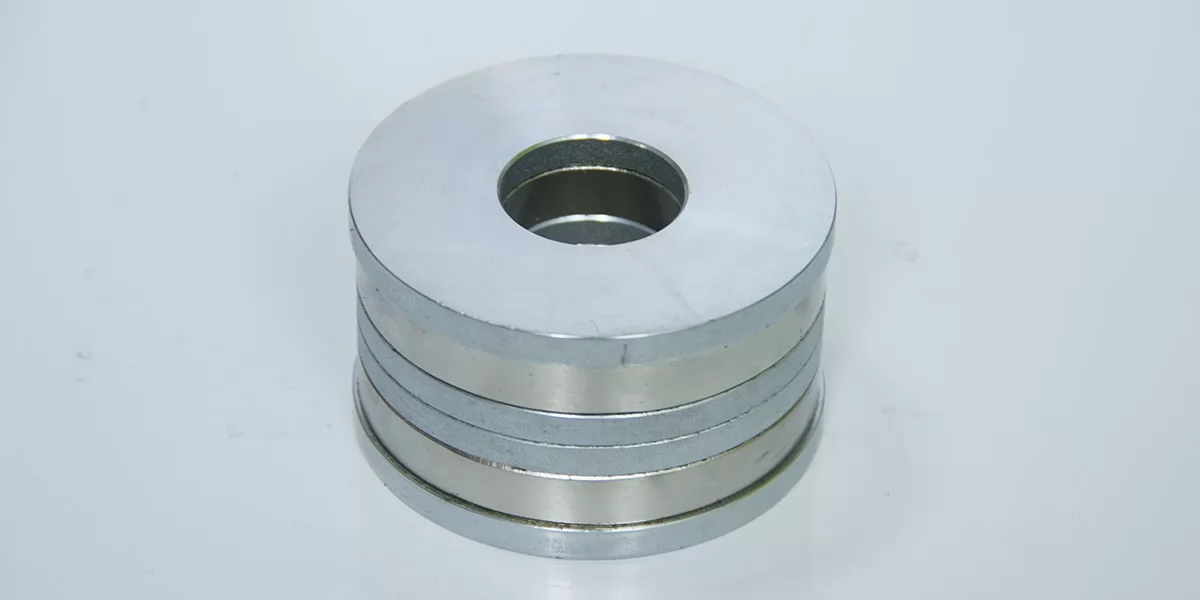
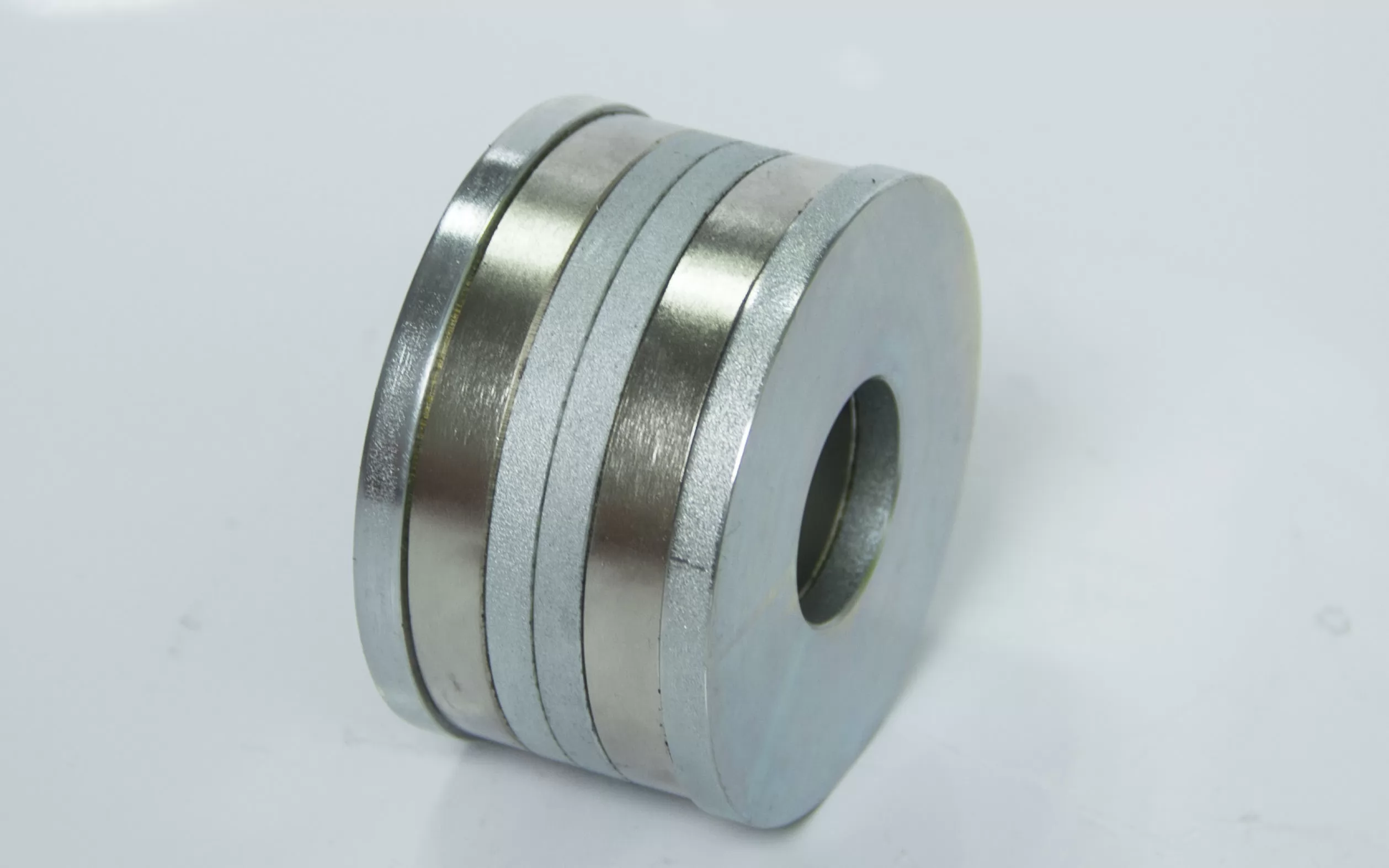
用于爬壁机器人的磁力驱动轮
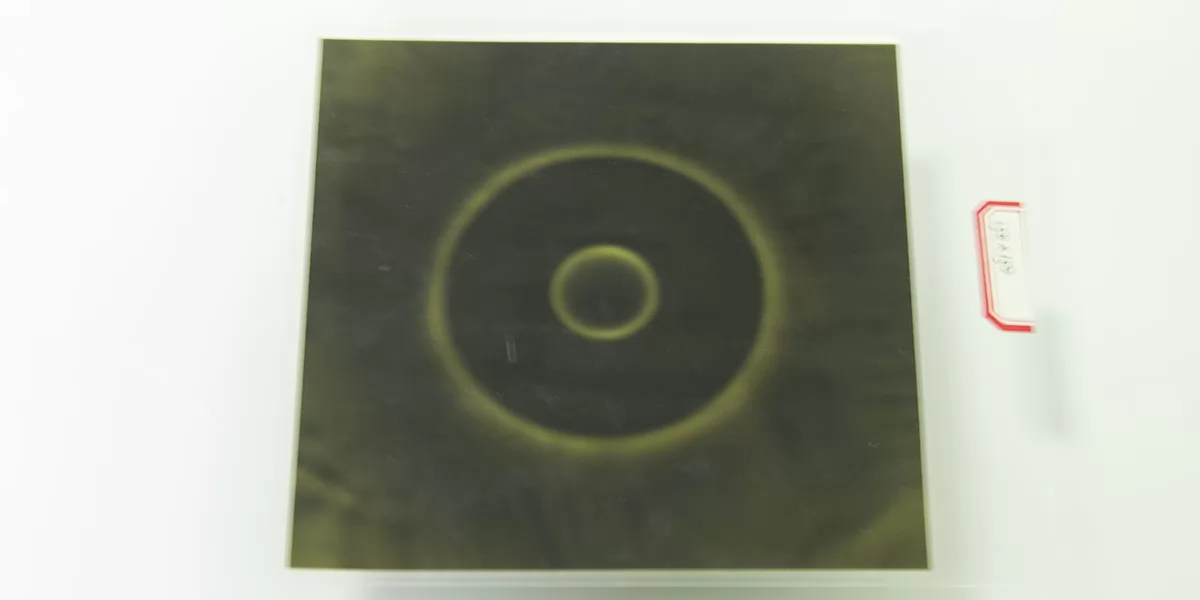
测试结果:
优点:
使用道具 举报
本版积分规则 发表回复 回帖后跳转到最后一页
小黑屋|东台市机器人学会 ( 苏ICP备2021035350号-1;苏ICP备2021035350号-2;苏ICP备2021035350号-3 )
GMT+8, 2024-5-5 12:28 , Processed in 0.037851 second(s), 28 queries .
Powered by Discuz! X3.4
Copyright © 2001-2020, Tencent Cloud.





 发表于 2021-8-12 12:27:22
发表于 2021-8-12 12:27:22